Spider Antenna
Principal of the spider antenna:


The figure shows the electronis to drive the spider antenna. The four motor are connected over the XLR conncetors. An Arduino is used to drive each stepper motor seperatly.
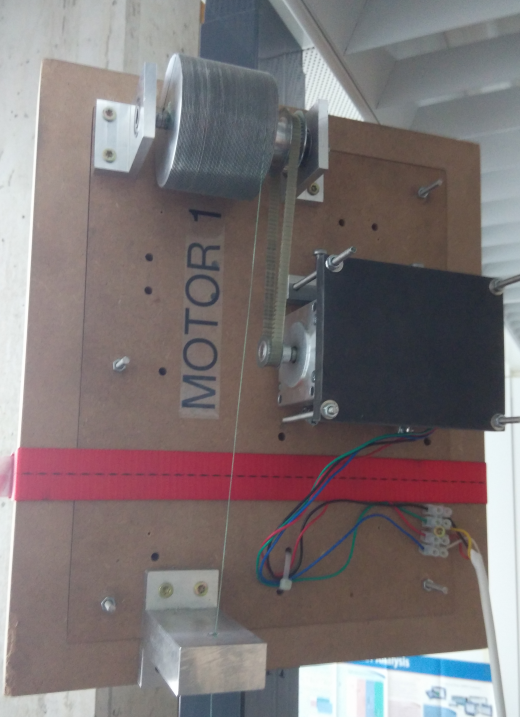
The figure shows an example for one stepper motor realisation, which is currently attached in the cornerstone holder.
The self build spider antenna is based on four stepper motors, and two software defined radios (SDR): The receiving SDR (USRP B210 from “Ettus Research”) is connected to the four motors by nylon ropes, as illustrated in the figure; by this, an arbitrary path in three dimensions can be traced. The transmitting SDR is a USRP B200, which is placed along a line parallel to the measurement area. In this configuration the setup can measure within a volume of up to 2m x 2m x 1.8m.
Hardware realisation: